ROS(Robot Operating System)は、ロボット工学アプリケーション用のフレームワークとツールを提供するオープンソースプロジェクトです。特定のハードウェアがどのように機能するかを知らなくても、複雑なソフトウェアを設計するのに役立ちます。
ノエティック はROSのLTSリリースであり、Ubuntu20.04用に調整されています。 ROS Noeticのサポートは最大2025(5年)です。サポートされているアーキテクチャは、amd64、armhf、およびarm64です。
このチュートリアルでは、ROSNoeticをインストールする方法について説明します。 Ubuntu 20.04 。
1。 Ubuntuに公式のNoeticリポジトリを追加する
ROS Noeticをインストールする最初のステップは、公式のROSNoeticリポジトリをUbuntu20.04ソースリストファイルに追加することです。
Noeticリポジトリを追加するには、次のように入力します。
$ echo "deb http://packages.ros.org/ros/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros-focal.list出力:
deb http://packages.ros.org/ros/ubuntu focal main.2。公式のROSキーリングを追加
次に、公式のROSキーリングをUbuntu20.04システムに追加します。これを行うには2つの方法があります。
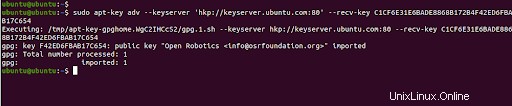
最初の方法は、 hkp://keyserver.ubuntu.com:80を使用することです。 Ubuntuキーサーバー。これが機能しない場合は、 hkp://pgp.mit.edu:80に置き換えてみてください。 。したがって、以下のコマンドを実行します。
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
2番目の方法は、curlコマンドを使用して公式のROSキーリングをダウンロードし、ローカルに追加することです。
$ curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -「OK」という出力は、キーが正常に追加されたことを意味します。
3。 ROSパッケージインデックスを更新する
次に、リポジトリからROSNoeticパッケージ情報を取得するようにUbuntuシステムを更新します。
$ sudo apt updateこれにより、新しく追加されたリポジトリがオンラインのUbuntuリポジトリと同期されます。
4。 Ubuntu20.04にROSNoeticをインストールする
ROSには、特定のニーズに応じてインストールすることを選択できるいくつかのメタパッケージがあります。
以下は、公式のROSNoeticメタパッケージです。
- ros-noetic-desktop-full
- ros-noetic-desktop
- ros-noetic-ros-base
- Ros-noetic-ros-core
好みのメタパッケージを選択し、以下のコマンドのいずれかを使用してインストールします。
ros-noetic-desktop-fullをインストール
パッケージros-noetic-desktop-fullには、ros-noetic-desktopのすべてのパッケージに加えて、perception(ros-noetic-perception)およびsimulation(ros-noetic-simulators)パッケージが付属しています。
ros-noetic-desktop-fullをインストールするには、次のコマンドを実行します。
$ sudo apt install ros-noetic-desktop-fullコマンドを実行した後、 Yを押します インストールを続行します。
ros-noetic-desktopをインストールする
Ros-noetic-desktopは、ros-noetic-desktop-fullの最小バージョンです。以下を含むほとんどのチュートリアルパッケージが含まれています:
- vis
- 角度
- common_tutorials
- geometry_tutorials
- ros_tutorials
- roslint
- urdf_tutorial
- visualization_tutorials
ros-noetic-desktopをインストールするには、次のコマンドを実行します。
$ sudo apt install ros-noetic-desktopros-noetic-baseをインストールする
ros-noetic-baseには、基本的なパッケージのみが含まれています。これには、ros_coreのパッケージと、動的再構成、ノードレット、actionlibなどの他の基本的な非ロボットツールが含まれています。
ros-noetic-baseをインストールするには、次のコマンドを実行します。
$ sudo apt install ros-noetic-baseros-noetic-coreをインストールする
ros-noetic-coreには、最小限のパッケージのコレクションが含まれています。パッケージには次のものが含まれます:
- common_msgs
- gencpp
- ジェネウス
- genlisp
- genmsg
- gennodejs
- genpy
- message_generation
- message_runtime
- pluginlib
- ros
- ros_comm
- rosbag_migration_rule
- rosconsole
ros-noetic-coreをインストールするには、次のコマンドを実行します。
$ sudo apt install ros-noetic-core5.ROSNoetic環境をセットアップする
次のステップは、ROSNoetic環境をセットアップすることです。まず、ROSを使用するすべてのbashターミナルでsetup.bashスクリプトを入手し、次のように入力します。
$ source /opt/ros/noetic/setup.bash新しいシェルを起動するたびに実行されないように、ホームディレクトリにある.bashrcファイルを追加します。
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc次のコマンドを実行して確認します。
$ tail ~/.bashrc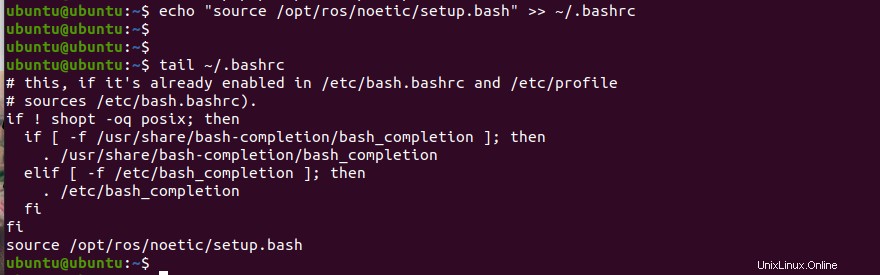
変更を有効にするには、次のように入力します。
$ source ~/.bashrc Noeticのインストールを確認する
Ubuntu20.04にROSNoeticを正常にインストールしたら、roscdコマンドを実行するだけです。
$ roscdプロンプトの現在のディレクトリが/opt / ros / noeticに変わることに気付くでしょう。 、Noeticをインストールした場所です。

roscoreを実行してインストールを確認することもできます noeticディレクトリのコマンド。出力には、要約にrosディストリビューションとrosバージョンが表示されます。
$ roscore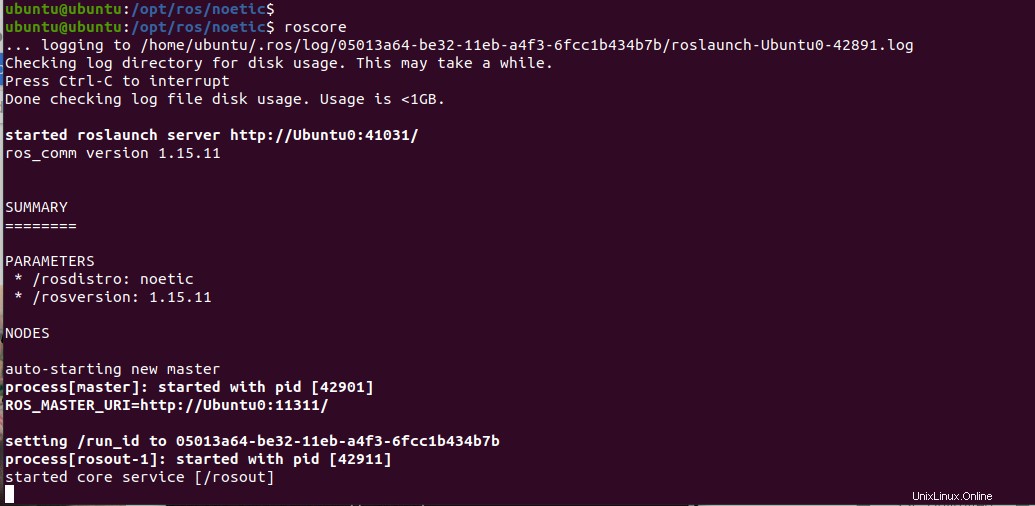
結論
このチュートリアルでは、Ubuntu20.04にROSNoeticをインストールする方法を学びました。これで、Noeticを使用してロボットをプログラムできます。