Linux は、多くのドローンおよびロボット ソフトウェアで強化されています。この業界は、人工知能と機械学習に完全に関連しており、異なる種類の専門知識と創造性が必要です。テクノロジーの新時代が到来して以来、テクノロジーは主に科学研究分野で重要な役割を果たし始めています。また、この種のものを構築して制御するのは安価ではありません。したがって、この業界での経験が豊富であっても、特定の製品を決定することは十分に怪しいものです。
最高のドローンおよびロボット ソフトウェア
今日は、Linux システムで最高のロボットとドローン ソフトウェアについて説明し、お知らせします。最も用途が広く、ユーザーフレンドリーなアプリケーションを選択しようとしました。無料のものもあれば、高価なものもあります。それでは、下の中心点を見てみましょう!
1.ガゼボ
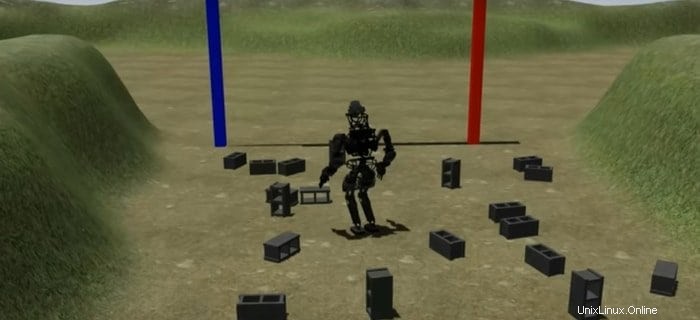
Gazebo は、アルゴリズムのテスト、ロボットの設計、人工知能 (AI) システムのトレーニングを行うのに十分な専門知識を備えた、最も人気があり不可欠なロボット ソフトウェアの 1 つです。実際のシナリオに関する機能を提供することを目的としています。独立したプロジェクトになる前は、プレーヤー プロジェクトの重要なコンポーネントでした (このコンテンツにも含まれています。以下を参照してください)。
Gazebo の注目すべき機能
- Gazebo は、3D 環境で複数のロボットをシミュレートできる優れた設計のシミュレータです。
- パフォーマンスを向上させるために、Bullet、ODE、DART などの複数の物理エンジンにアクセスできます。
- iRobot Create、PR2、Pioneer2 DX など、Gazebo を備えた多くのビルド済みロボットを入手できます。
- ユーザーはカスタム プラグインを開発して、Gazebo の API に直接アクセスできるロボットやセンサーの機能を強化できます。
- XML 形式の SDF を使用して、カスタム ロボットを構築し、側面を記述することもできます。
- 概念を詳細に説明する役立つチュートリアルと、多くの実践的な演習で強力なサポートを提供します。
2. ArduPilot
ArduPilot には、C++ および Python 言語で記述された最も強力で高度なロボットおよびドローン ソフトウェアが付属しています。高度なデータロギングとシミュレーション技術により、すでに 100 万台以上の車両に搭載されています。この高度なプラットフォームは、GNU General Public License (v3) の下でライセンスされており、無料で使用できます。

ArduPilot の注目すべき機能
- クアッドプレーン、複合ヘリコプター、マルチローター、さらには潜水艦など、多くの新しいツールを含むあらゆる車両システムを制御することを目的としています。
- jDrones、AgEagle、Kespry などの多くの OEM UAV 企業に適しています。
- ArduPilot は、Linux や Microsoft Windows など、複数のプラットフォームで動作します。
- フォーラム、Github、Facebook を通じて強力なサポートを提供します。また、このツールを使用すると、豊富なドキュメントを入手できます。
- また、コプター、ローバー、さまざまな組み込みハードウェアなど、幅広いハードウェア コンポーネントをサポートしています。
3.ベータフライト
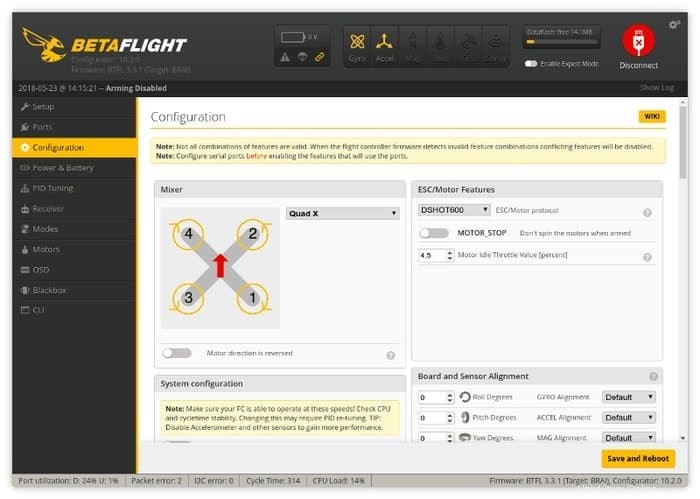
BetaFlight にはオープン ソースのドローン ソフトウェアが付属しており、より優れた飛行性能とサポートを提供することを目的としています。更新された機能と品質保証プロセスにより、最高のエクスペリエンスを提供します。また、ドローンの危険な行動を防ぐのに役立つ多くの安全機能を備えています。何か問題が発生した場合、状況に対処するための完全な制御が可能です。
注目すべき機能 クリーンフライト
- FlySky、Graupner、FrSky など、ほとんどのリモコン メーカーと互換性があります。
- フライト コントローラーを使用して、VTX とカメラ設定を制御できます。
- 専用の強力なコミュニティ サポートを提供します。また、ビデオ チュートリアルの使用を開始するためのヘルプも提供されます。
- BetaFlight は、Microsoft Windows、Linux、Mac OS などの複数のプラットフォームで動作します。
4. NASA ビジョン ワークベンチ
NASA Vision Workbench はオープン ソース データであり、画像処理ライブラリはさまざまな画像処理タスクを提供することを目的としています。このツールを使用すると、自動化された科学および工学分析、広範な衛星画像処理、ロボット認識などに取り組むことができます。また、さまざまなプロジェクト イメージでのブロック レベルの操作をサポートします。
NASA Vision Workbench の注目すべき機能
- サードパーティのライブラリを使用して、JPEG、PNG、PDS、および TIFF ファイルを読み書きする機能を備えています。
- さまざまなコンピューター ビジョン アプリケーションの展開に役立つ、使いやすく柔軟なシステムを提供します。
- 汎用処理ツールおよびマシン ビジョン フレームワークであるだけでなく、2D および 3D 環境の再構築機能も利用できます。
- デバッグ、型システム、およびキャッシュに関する優れたサポートを提供します。
- また、回転、再サンプリング、移動、任意のラップなど、さまざまな種類の画像変換が可能です。
5.プレーヤー プロジェクト
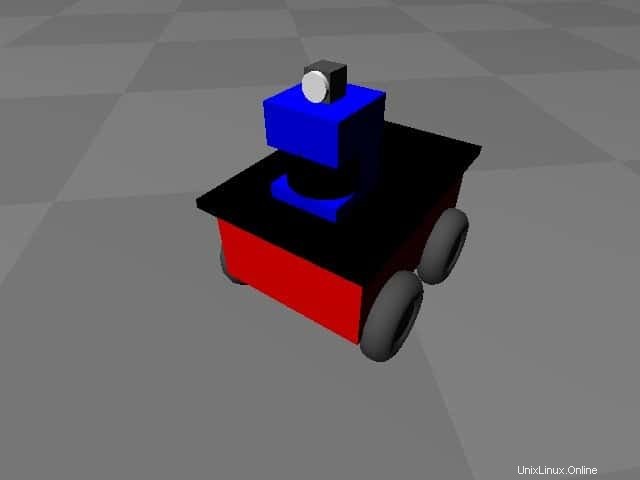
Player プロジェクトは、ロボット ソフトウェアの作成に役立つ最も人気のあるツールの 1 つです。このソフトウェアの主な目的は、ロボットとセンサー システムの研究です。これは、GNU General Public License の下でリリースされているオープン ソース アプリケーションです。これは、K-Team の Khephera、Botrics の Obot d100、Acroname の Garcia など、さまざまなハードウェアで使用できます。
プレーヤー プロジェクトの注目すべき機能
- Player プロジェクトは、他のロボット ツールと比較して最小限で柔軟なインターフェイスを提供します。
- これは、Windows、Linux、BSD、Mac OS X、および Solaris で動作するクロスプラットフォーム デバイス サーバーです。
- ユーザーは、標準のプレーヤー インターフェイスを使用してロボットとセンサーを制御できます。
- C、C++、Python、Ruby、Java、Tcl など、いくつかのプログラミング言語をサポートしています。
- Player Project を使用すると、シミュレートされたロボットの実験を行い、重要なロボット ジャーナルに公開できます。
- ユーザーがこのツールを最大限に活用できるように、役立つユーザー マニュアルを含む明確なドキュメントを提供します。
6. PX4
繰り返しになりますが、PX4 には、Dronecode の一部である最新のユーザーフレンドリーな飛行制御ソフトウェアが付属しています。ご存じのように、Dronecode は空飛ぶ乗り物を扱っている最も有名で有名な非営利団体の 1 つです。このオープン ソース プラットフォームは、BSD-3-Clause ライセンスの下で C++ プログラミング言語で構築されています。 ETH チューリッヒ (スイス連邦工科大学として知られている) によって開発されました。
注目すべき機能 PX4
- PX4 には、さまざまな種類の車両での使用を目的としたモジュール式の拡張可能なアーキテクチャが含まれています。
- コンパニオン開発ツールを使用して、柔軟で強力な飛行モードを提供します。
- PX4 は無料で使用でき、必要に応じて変更できます。
- MAVLink、MADSDK、および QGroundControl をホストできます。
- 消費者向けドローン、産業用アプリケーション、およびさまざまな研究プラットフォームで使用できます。
- ユーザーがソフトウェアの概要を明確に把握するために不可欠で役立つユーザー ドキュメントを提供します。
7.ダーツ
DART は、Dynamic Animation and Robotics Toolkit として表現されるオープン ソース ライブラリを指します。このプロジェクトは、ジョージア工科大学の Graphics Lab と Humanoid Robotics Lab によって作成されました。これは、BSD ライセンスに基づく共同プラットフォームであり、C++ プログラミング言語で書かれています。このロボット ソフトウェアを使用すると、ロボット プロジェクトを一歩先に進めるのに役立つ多くの機能を無料で利用できます。
DART の注目すべき機能
- 非線形プログラミングおよび多目的最適化と連携するための拡張可能な API を取得します。
- Bullet、ODE、FCL など、いくつかの衝突検出器をサポートしています。
- このソフトウェアを使用すると、最小距離を計算したり、任意のエンティティの運動学的状態にアクセスしたりできます。
- DART はクロスプラットフォーム アプリケーションであり、Windows、Ubuntu、FreeBSD、Mac OS、Archlinux など、主要なすべてのシステムで実行できます。
- 凹面メッシュ、プリミティブ形状、確率的ボクセル グリッドなどのさまざまな形状をサポートします。
- パフォーマンスを向上させる「アイランド」テクニックによる細分化制約処理のサポートを提供します。
8.クリーンフライト
CleanFlight は、現代で最も人気のあるフライト コントローラ ソフトウェアの 1 つです。これは、幅広いハードウェア コンポーネントをサポートするオープン ソース プロジェクトです。ユーザーは無料で使用でき、このツールの改善にも貢献できます。
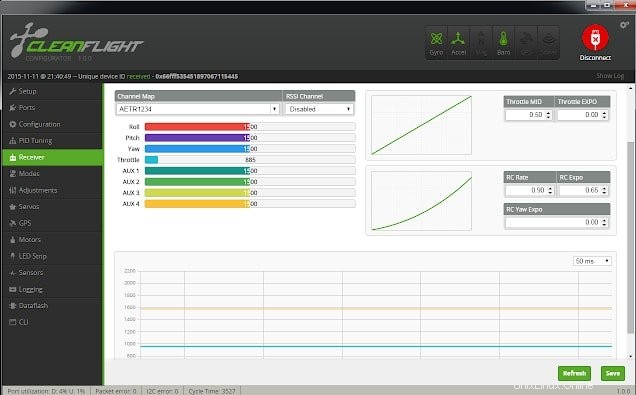
注目すべき機能 クリーンフライト
- 他の多くの関連ソフトウェアと比較して、安全で印象的な飛行性能を提供します。
- ユーザーからのフィードバックを得るために、Facebook、Github、および Twitter にアクティブでフレンドリーなコミュニティが含まれています。アクティブな開発者は、常にユーザー エクスペリエンスの向上に努めています。
- CleanFlight は、理解可能で十分にテストされ、適切に文書化されたコードを提供するため、その後の開発がよりスムーズになります。
- ツールのインストールと構成について知るための最新の役立つユーザー ドキュメントもあります。
9.パパラッチUAV
Paparazzi UAV は、Linux コミュニティにとってもう 1 つの重要な無料のドローン ソフトウェア パッケージです。また、GNU General Public License (v2) に基づくオープン ソース プロジェクトでもあります。このソフトウェアの助けを借りて、多くの無人航空機システムが研究や専門的な目的で使用されています。
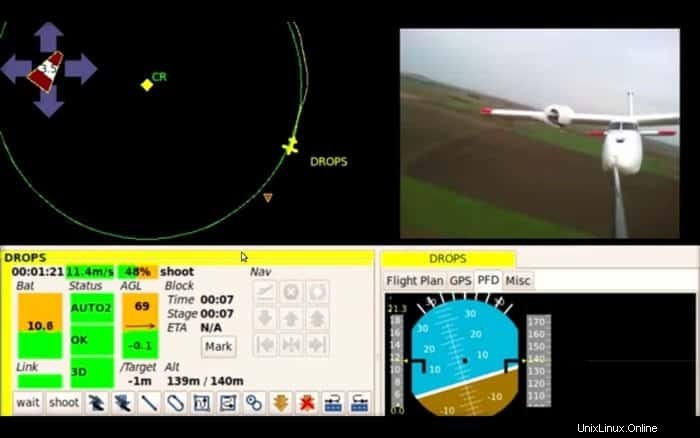
注目すべき機能 パパラッチUAV
- パパラッチでは、スロットルとピッチを使用して上昇速度を制御できます。
- デバイスを正しくセットアップするためのソース コードとチュートリアルを提供します。
- 従来の固定翼およびマルチコプターの機体と高度に構成可能で互換性があります。
- 気圧、ソナー、温度、湿度など、さまざまなセンサーと連携できます。
10.アルゴス
ARGoS には、大規模なロボットの群れを高性能でシミュレートできるマルチフィジックス ロボット シミュレータが付属しています。このロボット ソフトウェア システムは、MIT ライセンスの下でリリースされています。いくつかの物理エンジンを提供し、同じ実験でそれらを実行できます。また、ユーザーフレンドリーなインターフェイスを使用して、新しいアクチュエータ、ロボット、センサー、および物理エンジンを簡単に追加できます。
ARGoS の注目すべき機能
- 新しいプラグインを追加してプロジェクトをカスタマイズし、必要に応じて機能を強化できます。
- ユーザーと開発者のマニュアルに適切なドキュメントを提供して、ユーザーに詳細を知らせます。
- これは、研究を支援し、最適化された正確なデータを取得するための不可欠なツールと見なされています。
- Linux や Mac OS X など、複数のプラットフォームで動作します。
11. OpenDroneMap
OpenDroneMap には、ドローンからマップ、点群、および DEM を生成するのに役立つコマンドライン ツールキットが付属しています。優れた機能を備えた航空データを収集して処理するオープンなエコシステムです。 OpenDroneMap は、GPLv3 ライセンスに基づくオープン ソース製品です。これにより、ユーザーは最小限の Web インターフェイスを介してその機能にアクセスできます。

注目すべき機能 OpenDroneMap
- 画像をスムーズに視覚化して保存するための使いやすく拡張可能な API を提供します。
- Linux、Windows、Mac OS など、複数のプラットフォームで動作します。
- また、さまざまなプラットフォームでのセットアップ手順を含む適切なドキュメントを提供します。
12.リブレパイロット
2015 年のこのプロジェクトの開始以来、LibrePilot はロボティクスと車両制御の研究開発の改善と安定化のために実行されています。 LibrePilot は OpenPilot チームによって C および C++ プログラミング言語で書かれています。上記のほとんどのプロジェクトと同様に、Linux、Mac、Windows、および Android システムの両方で実行されます。
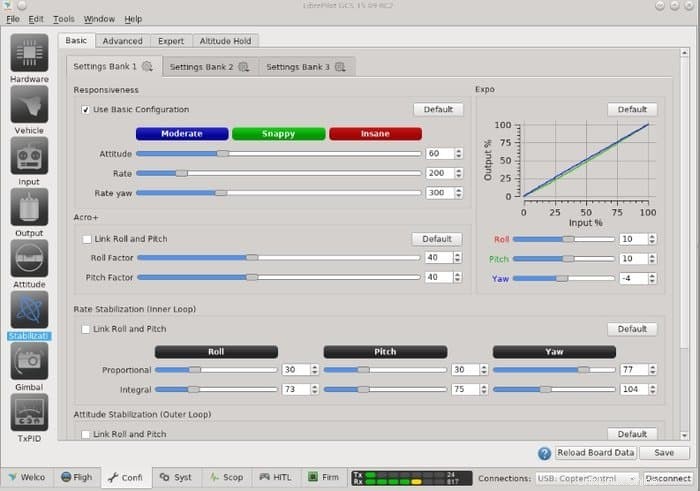
注目すべき機能 リブレパイロット
- 複数の入力 (PPM、PWM、DSM Sat、HoTT など) および出力 (PWM、OneShot125、OneShot42、PWMSync など) プロトコルをサポートしています。
- Revolution、Sparky2、CC3D などの複数の FlightController を使用できます。
- LibrePilot は、MAVLINK や MSP など、いくつかのテレメトリ プロトコルをサポートしています。
- 自動離陸、自動着陸、自律飛行を制御します。
- ユーザーはさまざまな飛行モードで作業できます。態度、マニュアル、レートなどです。
13. ドロニン
dRonin は、クアッドコプターやさまざまな小型航空機システムを制御するための、ユーザーフレンドリーで簡単なソフトウェアです。使いやすく、広く使用されているインターフェイスが付属しています。 dRonin は、GPLv3 ライセンスに基づくオープン ソース製品であり、無料で使用できます。主に、さまざまなタイプのレースや自動飛行に適しています。基本的なセンサーを備えたマイクロ フライト コントローラーの理想的なプラットフォームとして使用できます。
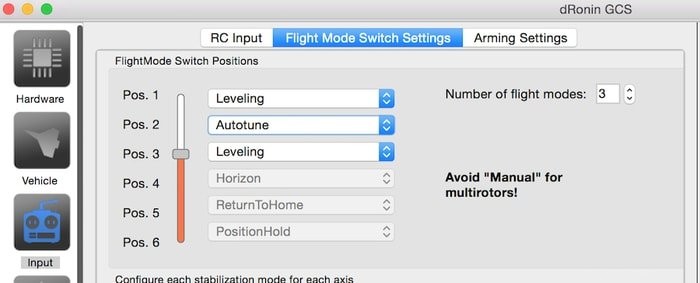
注目すべき機能 ドロニン
- セットアップ ウィザードと機能により、適切に調整されたマシンを飛行させるための柔軟な環境を提供します。
- Sparky、BrainFPV、DTF Seppuku など、多くのハードウェアをサポートしています。
- 多数のロボット工学およびアクセサリと互換性があります。
- ユーザーは、さまざまな従来の RC 飛行機、ヘリコプター、ヘックスコプターなどを制御できます。
- Facebook や Github などのソーシャル プラットフォームやプロフェッショナル プラットフォームで、わかりやすいドキュメントと活発なコミュニティを提供します。
14. OpenRTM-aist
OpenRTM-aist には、特にロボット システムを開発するためのソフトウェア プラットフォームが付属しています。産業技術総合研究所は、RT コンポーネントに基づいてこのツールを開発しました。 C++、Java、および Python 言語で記述されています。
OpenRTM-aistの注目機能
- GNU Lesser General Public License および Eclipse Public License の下でライセンス供与されています。
- 完全なインストール ガイドラインを含む明確なドキュメントを提供します。
- OpenRTM-aist には、フォーラム、メーリング リスト、トレーニング、コンテストなどの活発なコミュニティがあります。
- これは、Windows、Linux/Unix、Mac OS、および FreeBSD システムをサポートするクロスプラットフォーム ソフトウェアです。
- 異なる RTC 間で柔軟な通信環境を提供します。
15.ドローンコード
Dronecode は、学術、産業、アジャイルのスタートアップ向けの最新の高度なドローン ソフトウェア パッケージです。 The Linux Foundation がホストするオープン ソース プロジェクトが付属しており、幅広い柔軟な機能を備えています。 Dronecode は、Python、Java、および Objective C で構築されています。ドローンの作成以外にも、科学研究にも広く使用できます。

注目すべき機能 ドローンコード
- 中立的で透過的なガバナンスを備えた、IP フレンドリーで寛容な BSD ライセンスを提供します。
- VTOL、固定翼、マルチコプター、地上車両など、あらゆるタイプの車両に対応する柔軟なシステム。
- Can be used in different purposes like surveying and inspections, racing, aerial photography, medical supply, and more.
- Supports high latency telemetry and structure scanning. Also, it provides the facility of wind estimator.
- Contains an active and friendly community that supports its users in almost every step.
- You can run Dronecode on different platforms, including Linux, Mac OS X, Windows, and Android.
16. URBI
Now, it’s time to let you know about another open source robotics platform, URBI. It refers to the Universal Robot Body Interface that is built to develop complex robotic applications. This platform is licensed under the GNU Affero General Public License. It provides a standard API that helps to describe various algorithms and sensors.
Noteworthy Features of URBI
- URBI provides an easy-to-use interface using C++ component library.
- It provides the facility of voice recognition, voice synthesis, face detection, and face recognition.
- You can also detect color blob using this platform.
- It is a scripted language that can access sensors, speakers, and other components of the robot.
17. ROS
ROS comes with a flexible and accessible framework to create modern robot applications, written in C++, Python, and Lisp languages. The full meaning of this tool refers to the Robot Operating System, which is entirely open source and released under the BSD license. Also, it provides internationalization support in different languages, including German, English, Italian, Korean, Brazilian, Thai, and more.
Noteworthy Features of ROS
- It brings with a wide range of tools and libraries to make the task of building sophisticated robots flexibly and securely.
- Provides strong support and tutorials to get step-by-step instructions to learn this tool properly.
- Compatible with major platforms like Linux, Mac OS, and Windows.
- Includes over 2000 software libraries, many useful APIs, and also a wide range of standard tools for developing and debugging purposes.
18. Fawkes
Fawkes comes with a robot software framework to create and run real-time robotic applications. This program is written in C++ programming language released under the GNU General Public License v2. It brings a complete package with clean structure and documentation in most of the professional areas. Also, it is free to use.
Noteworthy Features of Fawkes
- Provides a component-based approach to increase the efficiency of the application.
- Fawkes runs best on modern Linux and Unix systems, including Fedora and also on FreeBSD.
- Using hybrid blackboard system, it helps to make the communication without conflicting commands.
- It lets you use FireVision, an integrated computer vision framework which helps to transmit images over the network for visual debugging.
- Also, it provides a component-based design and compatible with a variety of platforms.
19. Rock
Rock is a specialized robotic software framework for Linux system, developed in C++ and Ruby languages by DFKI Robotics Innovation Center. It provides the facility of error detection, reporting, handling, and smoothly managing large systems. This Robot Construction Kit helps users to run reliable and high-performance robotic systems in different applications.
Noteworthy Features of Rock
- Rock provides a sustainable system to build modern robots.
- It lets you extend the functionality by adding new components in your robot.
- Complete tutorial package to let users create libraries, configure and connect components, installing packages, and more.
- It contains a flexible graphical user interface. Also, it provides 2D and 3D visualization support using QT-Framework and VizkitWidget.
20. CARMEN
CARMEN, an open source collection of a robot software framework, refers to Carnegie Mellon Robot Navigation Toolkit. Carnegie Mellon University developed this application aims to sensor control, obstacle avoidance, logging, and path planning. Though it is written in C language, it can also provide Java support.
Noteworthy Features of CARMEN
- A proper toolkit for Linux platform under General Public License.
- It supports various hardware, including iRobot ATRV, ActiveMedia Pioneer 1 and 2, OrcBoard, Segway, and more.
- CARMEN provides the facility of localization, scan-matching, and a mapping module.
- Also, it supports different sensors like the SICK LMS laser measurement system, Sonar, Hokuyo IR, and more.
- Provides complete documentation with download and installation process.
Wrap Up
So, it’s time to finish up our discussion on finding the drone and robot software for Linux system. We tried to sort out the most popular and user-friendly applications for our users so far. From the software mentioned above, you will find most of them as open source and free to use. Besides these, let us know if you have any other choices.
Finally, you are requested to share this article with your beloved communities to let other people know about this. Thanks for your valuable time.